2017년 01 월
미래를 열다
함께 열어요
한국기계연구원, 맞춤형 재활 가능한
‘하지재활로봇’ 개발
한국기계연구원 의료지원로봇연구실 연구진들은 환자의 맞춤형 재활을 위하여 재활 대상자의 34개 하지 주요 근육과 33개 전신 주요 골격을 모델링한 근골격 모델을 개발했다. 각 관절의 관절부하와 근력, 외부 환경으로부터의 반력 등을 고려하여 재활 요구에 부합하는 맞춤형 하지 관절의 운동 궤도를 설계할 수 있는 기술이다. 또 비교적 비전문가라 하더라도 재활 대상자의 근골격 모델에 따라 최적의 보행 패턴을 분석하고 재활 프로그램을 설계할 수 있는 환경도 개발했다.
충분히 자유롭게 외력 가해지도록 설계
로봇을 사용한 재활훈련을 위해서는 부드러운 운동 궤도와 로봇을 사용한 외력궤도를 함께 사용하는 것이 바람직하다. 우리 연구팀은 재활운동 궤도 및 재활 로봇의 외력 궤도에 대한 구조를 충분한 자유도를 가지도록 먼저 설계하고, 재활 효과를 향상시키는 각 궤도의 상세 파라미터를 ‘유전적 알고리즘(GA)’을 활용해 재활 프로그램을 만들어낼 수 있도록 했다.
하지재활로봇 ‘뉴렉스’는 고관절과 무릎관절 주변에 설치된 네 개의 모터에 의해 구동된다. 각 모터는 엔코더와, 하모닉기어, 토크센서가 박형으로 결합되어 서로 연동되며 최대 토크는 30Nm 이다. 트레드밀 시스템과 VR 영상은 보행속도에 따라 자동으로 움직이도록 설계됐다.
이 통합 플랫폼은 환자의 근골격 모델을 사용한 재활운동 궤도의 설정 뿐 아니라 과거 재활 운동 기록을 관리하고, 재활 대상자와 의사, 물리치료사, 로봇 공학자 등 관계된 사람에게 로봇 설정을 공유할 수 있는 환경을 제공한다.
신체정보 입력하면 자동으로 로봇 재활치료 가능
당신이 만약 교통사고로 다리를 다치거나 운동을 하다가 다리를 다쳐서 우리의 하지재활로봇을 이용해 재활치료를 하기로 했다고 가정해 보자. 그럼 먼저 당신의 근골격을 측정해야 한다. 정확하게 측정하기 위해서 해부학적 골격의 길이를 일일이 다 입력하는 것이 아니라, 수분 내로 인체의 주요한 골격의 길이와 체중, 키 등의 정보를 시스템(하지재활 통합 플랫폼)에 입력하고, 재활 대상부위정보를 입력하면 당신의 재활에 딱 필요한 만큼의 로봇의 설정이 자동으로 설정되고, 그렇게 재활치료를 시작할 수 있다.
우리는 인체 주요한 33개의 골격과, 하지 주요 34개의 근육모델을 사용한 근골격 모델을 개발하였다. 재활 운동 시 발생하는 각 관절의 작용력을 계산하기 위하여, 인체를 강체 링크 모델로 모델링한 33개의 동역학 방정식을 풀어야 한다. 또한 각 근육의 시작점, 종점, 및 최대 근단면적과 근육 모델을 사용한 근력 활성도를 구할 수 있다. 동역학 방정식과 근력 활성화도 정보를, 외부 환경과의 접점에서 지면 반력과 같은 외력을 고려한 후, 각 근육의 모멘트암*을 사용하여 정합시킬 수 있으며, 이를 모든 근육에 적용함으로써, 근력을 계산할 수 있다.
*모멘트암
회전력이 작용할 점과 회전력을 제공할 점 사이의 거리를 90도 각도를 기준으로 측정한 길이
한국의 명산책로 7선 선택해 재활 훈련
하지 재활 통합 플랫폼을 이용하면 GA 알고리즘을 사용하여 해당 근육그룹의 근력을 강화시키기 위한 주기적이고 무게중심을 고려하여 넘어지지 않는 보행 패턴을 반영한 프로그램을 30분 이내에 설계할 수 있다.
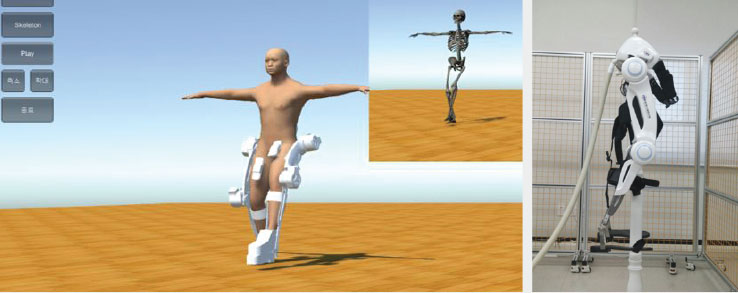
GA 알고리즘에 의한 재활 운동 테스크를 설계하면 상위 100개의 재활 테스크 후보가 상위 순으로 화면에 나열 되며, 각각의 운동 패턴에 대해 컴퓨터 시뮬레이션을 실시하면서 정확한 주요관절의 각도 등을 화면에서 확인함으로써 그 훈련이 얼마나 효과적일지 검토할 수 있다. 또 가상의 재활 대상자가 개발된 하지 재활 로봇을 입고 재활 훈련을 실시하는 모습 뿐 만 아니라, 그 사람의 눈에 보이는 환경을 관찰 할 수 있어 실제 재활 실시 전 이미지 트레이닝도 가능하다. 재활 훈련 시스템의 재활 대상자 전면에 설치되어 있는 화면을 통하여 한국의 명산책로 7선을 선택하여 재활 훈련을 하면서 아름다운 경치를 감상할 수도 있다.
우리 연구원의 하지 재활로봇 연구는 근골격모델을 사용한 재활훈련 통합 플랫폼이라는 점이 가장 큰 특징이다. 앞으로도 재활 훈련 대상자의 노력과 로봇에 의한 외력을 동시에 사용한 재활훈련의 유효성을 입증하기 위해 연구개발에 매진할 것이다.